
Dossier de presse robot câlineur Probo
Probo est doux et peut être câliné. Il
ressemble à un animal vert proche du pachyderme, mais il est beaucoup plus
complexe que cela. Probo est un condensé de technologie de pointe: 20 moteurs,
des senseurs, de l’électronique et un écran tactile. Grâce à cela, le robot
peut exprimer différentes émotions et percevoir son entourage. Probo est l’une
des premières plates-formes robotique au monde qui se penche sur l’étude de la communication
émotionnelle entre enfants et robots. Le robot sera utilisé comme objet
expérimental par un groupe de recherche multidisciplinaire dans le but de
rendre plus supportable les souffrances des enfants hospitalisés. Le premier
prototype sera rendu public le 21 avril 2009 en présence des ministres
bruxellois Guy Vanhengel et Benoît Cerexhe.
Pourquoi Probo?
La
nouvelle génération de robots collaborera fortement avec l’homme dans la vie de
tous les jours: des tâches ménagères aux soins médicaux. Pour cela, la
communication est essentielle. Plus de 60% de nos échanges se font sans l’usage
de la parole, mais en grande partie par les expressions du visage. Il est donc
fondamental de développer des robots capables d’interpréter et d’imiter
correctement ces expressions. Le développement de ces nouvelles technologies
doit être basé sur la communication humaine. Le robot devra s’y adapter et non
le contraire comme dans le cas des ordinateurs ou du téléphone portable. Probo
sert de plate-forme de recherche pour étudier les interactions cognitives entre
l’homme et le robot. Probo est une peluche douce qui invite à la caresse et à
la douceur, il est spécialement conçu pour travailler avec des enfants et les
soutenir durant leur séjour à l’hôpital.





Qui est Probo?
Probo est
un animal imaginaire avec son identité propre. Caractéristique particulière: il
a une trompe. Le nom de Probo provient du mot “proboscidea” qui désigne la
famille des mammifères pachydermes. La plupart de ces animaux ont disparu lors
de la dernière ère glacière. Dans Probo, il y à aussi ROBO qui met l’accent sur
sa nature robotisée.
La mécanique
est entourée d’un plastic protecteur, d’une couche de mousse et d’une fourrure
douce au toucher pour le rendre plus agréable. Sa couleur est verte et rappelle
des émotions positives comme la détente, la nature et le confort. Sa forme fut
déterminée après différents tests effectués avec des enfants.
Le choix
de donner à Probo le corps d’un animal imaginaire est bien conscient. De cette
manière, on évite que les enfants aient des attentes a priori par rapport à son
comportement. Un écran tactile a été incorporé dans le ventre ainsi que la
possibilité de développer une langue propre.
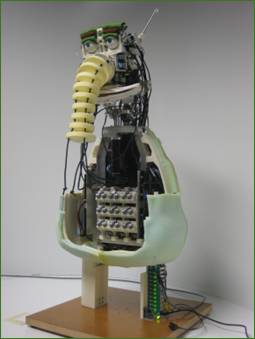

De quoi se compose Probo?
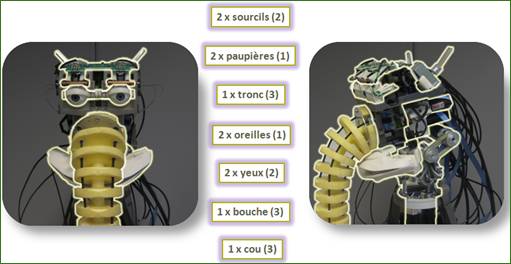
Pour
produire plusieures émotions faciales, le robot est équipé de 20 moteurs.
Ceux-ci sont utilisés pour imiter le mouvement des oreilles, des sourcils, des
paupières, des yeux, de la trompe, de la bouche et du cou. Pour rendre le robot
plus agréable au toucher, compte tenu de sa structure en couche, le type de
motorisation a été spécialement adapté. La motorisation souple est possible
grâce à l’emploi de ressorts placés en série avec les moteurs. Si, par exemple
la trompe est saisie par l’enfant, celle-ci bougera sans incidence. Probo est
dans tout les cas totalement inoffensif. Son écran tactile, au niveau du
ventre, offre une interaction supplémentaire.
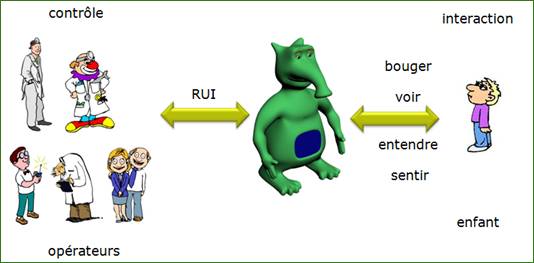
Comment est contrôlé le robot?
Le robot
est contrôlé par un software nommé Robotic User Interface. Actuellement il est dirigé
par un operateur, mais dans l’avenir il évoluera vers un système autonome. Il sera
alors capable de percevoir son environnement et sera équipé de senseurs telle
une camera dans la tête, différents microphones et des récepteurs tactiles sous
sa fourrure.
Pour que
le robot puisse exprimer des émotions, elles ont du être quantifiées. Le
vecteur d’émotion que nous créons est représenté sur un cercle en 2D ou l’axe X
représente la valence et l’axe Y l’excitation. Au centre se trouve la position neutre.
Le vecteur varie continuellement pour évoluer d’une émotion à une autre comme
l’étonnement, la joie, la colère, la tristesse, l’ennui, la léthargie, la
décontraction. Chaque point dans le cercle peut être traduit par une position
des moteurs.
Les
premiers tests ont commencé, les besoins primaires du robot, influencés par ses
perceptions, contrôlent les vecteurs d’émotions de sorte qu’un système plus
autonome puisse être développé. Pour atteindre cet objectif, le jeu ProboGotchi
est utilisé.
Pourquoi Probo est-il utilisé?
Le robot sera utilisé comme plate-forme de recherche dans 3 disciplines
différentes. Les sciences d’ingénieurs augmenteront l’autonomie du robot, en
utilisant la vision, la parole et l’intelligence artificielle. Ces domaines
font l’objet de recherches approfondies et grâce à Probo il sera possible de
les tester sur une nouvelle plate-forme et de les valider. En coopération avec
le secteur médical la thérapie assistée par des robots sera développée. Cette
technique de thérapie a déjà montré ses bienfaits aussi bien chez des patients
âgés que chez des enfants autistes. Probo se focalisera surtout sur les enfants
hospitalisés. De cette manière, il aidera à préparer et réconforter les enfants
en qui doivent subir des interventions chirurgicales. Il sera capable
d’utiliser ses facultés de communication émotionnelle avec les enfants. Des
jeux éducatifs lui seront aussi intégrés. En coopération avec des experts dans
le domaine de la sociologie et la psychologie, l’interaction entre l’homme et le
robot sera étudiée et de nouvelles possibilités de communication émotionnelle
seront testées.
Probo sert aussi de plate-forme
éducative. Des étudiants du cycle secondaire et supérieur établissent des
projets en fonction du robot. Chacun apporte sa pierre à l’édifice. Ceci motive
les étudiants et stimule l’innovation technologique.
Comment Probo évoluera t’il?
Le développement du prototype de Probo continue. Après la tête, le
corps et les bras seront aussi motorisés de sorte que le robot pourra aussi
s’exprimer avec des gestes et des positions. Ceci donnera à Probo toutes les
capacités nécessaires pour devenir une plate-forme unique au monde pour les
interactions entre l’homme et la machine. Différents exemplaires seront
construits et mis à la disposition d’institutions et d’hôpitaux. Un groupe
pluridisciplinaire développera ses propres technologies pour les implanter dans
le robot. Ainsi l’autonomie et l’intelligence pourront être augmentées petit à
petit. Une spin-off sera créée pour commercialiser le robot et ses produits
dérivés. La commercialisation se focalisera principalement sur des instituts de
recherche, des parcs d’attractions et des musées.
Qu’est ce que le jeu ProboGotchi?
Le jeu
ProboGotchi est un dérivé de différents modules mis au point pour Probo et
combinés de manière créative. C’est un jeux en 3D avec comme acteur principal
Probo. Le but de ce jeu est de rendre Probo aussi heureux que possible en
prenant soin de lui. Il faut lui donner à manger, le laver et le câliner. Quand
Probo est malade ou mal soigné, des microbes ou des puces se développent et
doivent être combattues. Probo est visible sur l’écran et réagit a chaque
action. C’est un jeu unique. La peluche de Probo munie de récepteurs contrôle
le jeu de manière innovante. Ces récepteurs détectent ou et comment le robot se
fait câliner, gratter ou brutaliser.


Qui sont les créateurs du robot?
L’idée
d’un robot câlin pour des enfants hospitalisés vient de Ivan Hermans,
initiateur de la Fondation Anty qui œuvre pour l’amélioration des conditions de
vie des enfants en souffrance. Katia Della Faille est l’ambassadrice de la
Fondation.
Les promoteurs
des mémoires sont Dirk Lefeber et Bram Vanderborght.
Dirk
Lefeber est responsable du laboratoire de robotique de la VUB. Son groupe fait
principalement de la recherche sur des robots qui marchent, la motorisation
souple, l’interaction humaine et robotique sécurisée, la robotique de
réhabilitation et bien évidemment l’interaction cognitive entre l’homme et le
robot Probo.
Bram
Vanderborght développa le Robot marchant Lucy pour sa thèse. Au Japon, il
programma le robot humanoïde HRP-2. Il travaille aussi à l’Italian Institute of
Technology où il développa entre autres le robot pour enfants iCub.
La
construction et la programmation furent établies par Jelle Saldien, Kristof
Goris et Jeroen Vandenbrande.
Jelle
Saldien est un ingénieur industriel spécialisé en design industriel. Jelle fit
une étude préparatoire du robot Probo dans le cadre de son mémoire. Sa
recherche se focalisa plus sur les programmes de contrôle et sur l’implantation
des émotions et expressions faciales. Jelle présentera sa recherche à la fin de
l’année.
Kristof
Goris est ingénieur civil en électromécanique et développa la structure
mécanique et initia la motorisation souple du robot. Kristof défendra également
sa thèse à la fin de l’année.
Jeroen
Vandenbrande est ingénieur industriel et technicien dans ce projet.
Probo a été
développé avec le soutien des ministres bruxellois Guy Vanhengel et Benoît
Cerexhe par le CIRB (Centre d’Informatique pour la Région Bruxelloise) et IRSIB
(Institut d'encouragement de la Recherche Scientifique et de l'Innovation de
Bruxelles).
Quand le robot sera-t’il rendu public pour la première fois?
Probo
sera rendu public pour la première fois lors de la compétition RoboCup Junior
le 16 May au musée des sciences Technopolis à Malines. Le jeu ProboGotchi y sera
également. Plus d’info sur www.robocupjunior.be.
Plus d’informations ? Contactez-nous !
Jelle Saldien (chercher): 0485-27 19 81
Prof. dr. ir. Dirk Lefeber (promotor): 0497-91 42 09
Service de Presse Vrije Universiteit Brussel: Karolien
Merchiers: 02-629 21 37 ou 0473-96 41 37
Nadya De Beule, porte-parole ministre Vanhengel:
0497-59 99 73
Béatrice Van Schendel, porte-parole ministre Cerexhe: 0499-58 88 51
Des images et vidéos en haute définition sont
accessibles à l’adresse suivante:
Veuillez mentionner “Probo –
Vrije Universiteit Brussel” avec les photos publiées.