
Press kit huggable robot
Probo
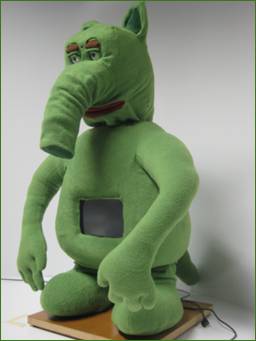
Probo has a soft appearance
and looks like a green elephant-like huggable, but is much more than that. The
inside of Probo is full of high tech: 20 precision motors, sensors, electronics
and a touch screen. The robot is able to show facial expressions and can sense
its environment. Probo is one of the first robotic platforms with a special
focus on interaction studies of emotional communication between robot and
child. The robot will be used as research platform in a multidisciplinary team
to enlighten the children’s stay in the hospital. On April 21st the first prototype was
presented at the Vrije Universiteit Brussel in the presence of
Why Probo?
The new generation of robots will collaborate
with humans in many different aspects of the daily life: from domestic tasks to
elderly, health and child care. Communication is hereby essential. More than
60% of our communication is non-verbal, mostly by facial expressions. Therefore
it is very important to develop robots that are able to reproduce and interpret
these expressions. Crucial for those new technologies is that the human plays a
central role in the communication, this infers that the robot should adapt its
communication means to the one of humans and not the other way around as is the
case now with computers and mobile phones. Probo will serve as research
platform for cognitive human-robot interaction studies. Probo has a high
huggable appearance because specifically children are targeted. Probo will for
example assist in providing information and moral support to hospitalized
children.





Who is Probo?
Probo is an imaginary animal type with an own
identity, including a name and a history. The name Probo is derived from the
word proboscidea. Proboscidea is an order that now contains only one
family of living animals, the elephants. During the period of the last ice age
there were more, now extinct species, including the mammoths and mastodons.
In the name Probo we can also see the word "ROBO" which emphasizes
the robotic nature of Probo.
The mechanics of Probo are covered by
protecting plastic shells, a layer foam and a soft fur to make the robot soft
and huggable. The colour of the robot is green, this colour evokes mainly
positive emotions such as relaxation and comfort. The recognition of facial
expressions using the virtual model of Probo was tested in different
user-studies. The results showed that the recognition of the emotional states of
Probo are good with an overall identification rate of 88 %, especially by
children.
The choice to give Probo the looks of an
imaginary animal is done deliberately. Now no special expectations are created
which are unavoidable when the character of a cat or dog was chosen. This
offers the possibility to add special features like the touch screen in the
belly and to develop a special language for Probo.
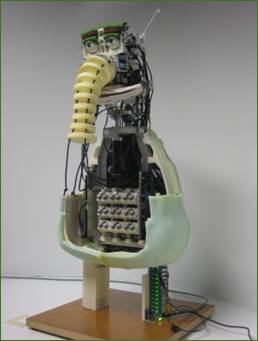
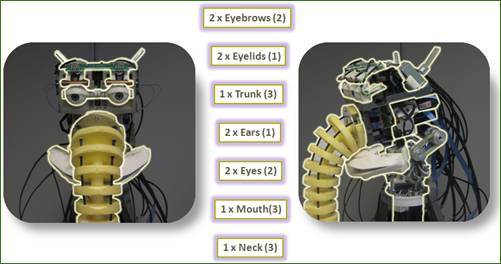
What is inside Probo?
The robot has 20 high precision motors in its
head. They are used to actuate the ears, eyebrows, eyelids, eyes, trunk, mouth
and neck. To build safety aspects intrinsically in the robots hardware all the
motors have a spring in series (series elastic actuation, SEA) so in case of a
collision the robot will be elastic and safe while providing a soft touch. The
joint can be easily moved when an external force acts on it. So for example the
trunk can be taken and moved around unrestricted.
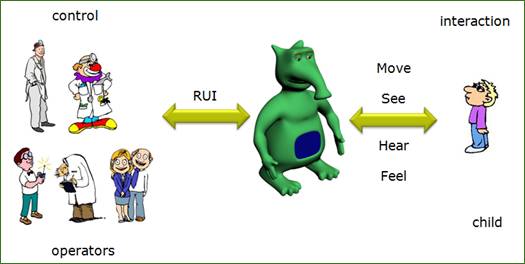
How is Probo controlled?
Probo is controlled by a dedicated software
program, the Robotic User Interface (RUI). At the moment an operator commands
the robot. Gradually more and more artificial intelligence components will be
implemented in the robot to increase the autonomy of the robot and to reduce
the role of the operator. In order to act autonomously, the robot has to be
able to sense its environment. Therefore the robot is equipped with different
sensors like a digital camera in the head, different microphones and touch
sensors under the fur.
To realize a translation from emotions into
facial expressions, emotions are parameterized. In our model two dimensions are
used: valence and arousal to construct an emotion space. Each emotion is
represented as a vector with the origin of the coordinate system as initial
point and the corresponding arousal-valence values as the terminal point. In
the center is the neutral emotion. The direction of each vector defines the
specific emotion whereas the magnitude defines the intensity of the emotion.
Each basic emotion correspondents with a certain position of the motors to
express the facial expressions as studied in the user test. Using this method,
smooth and natural transitions are obtained between the different emotions as
surprise, repulsive, angry, unhappy, bored, sleepy, relaxed and happy.
What will Probo do?
Probo will play a role in research in three
different disciplines. Engineering research teams will increase the autonomy of
the robot using vision, speech and artificial intelligence. Those fields are
extensively studied and using Probo they will be able to test and validate
their research.
In collaboration with the medical area the
possibilities in Robot Assisted Therapy (RAT) will be explored. This kind of
therapy is already successfully tested with elderly and autistic children. A
specific focus of Probo is long termed hospitalized children. For example Probo
will prepare and assist children for medical routines, therapy or operations.
As well, the robot can be used for edutainment purposes and can serve as a
videoconferencing platform.
Together with sociology and psychology the
human-robot interaction will be studied and the possibilities of emotional
communication will be explored.
For educational purposes, Probo serves as a
platform for small projects, which are outsourced to secondary schools, high
schools or universities. In those projects the students work on a specific
element of the project, knowing that their work is part of a bigger concept
proves very motivating. In this way the project motivates students and
stimulates new technological innovation.
What are the future plans
of Probo?
The prototype will be further improved to a
market-ready product. Besides the head, also the body and arms will be actuated
so besides emotions also gestures and poses can be shown. This will ensure that
Probo contains all the capabilities to remain a unique platform for human-robot
interaction studies. Different copies will be built and made available as
research platform for research institutes and hospitals. A multidisciplinary
team will create technologies to implement on the robot. Like this the autonomy
and intelligence can be gradually increased. There are also plans to create a
spin-off to commercialize Probo and derived products, possible markets are
research institutes, amusement parks and museums.
What is the
ProboGotchi-game?
The ProboGotchi-game is a derived product which
combines in a creative manner the different modules developed for Probo. ProboGotchi is a 3D game with the huggable
robot as main actor. Goal is to make Probo happy and take care of him. This is
done by feeding, washing and hugging the robot. When Probo is sick or not well
taken care of, microbes or fleas appears that need to be destroyed. Probo
reacts to the different actions of the user. Unique is the way how the game is
played. A stuffed version of Probo is equipped with touch sensors and acts as
an innovative game controller that detects how the robot is hugged, scratched
or hurt. This game gives the possibilities to explore haptic interaction and
the concepts how needs control the emotional state of Probo.


Who has built the robot?
The initial idea to build a huggable robot for
hospitalized children comes from Ivan Hermans. Ivan Hermans is founder of the
Anty Foundation. The Anty Foundation (www.anty.org) is a non-profit organization whose
purpose is to improve the life circumstances of vulnerable children. Katia
della Faille is goodwill ambassador of the Anty Foundation.
The promoters are Dirk Lefeber and Bram
Vanderborght.
Dirk Lefeber is head of the robotics lab at the
VUB. His research group is interested in walking robots, compliant actuation,
safe human-robot interaction, rehabilitation robotics and of course cognitive
human-robot interaction with the robot Probo.
Bram Vanderborght developed the walking robot
Lucy during his PhD. In Japan he programmed on the humanoid robot HRP-2. He is
also connected to the Italian Institute of Technology where he collaborates on
the child robot iCub.
The construction and programming was performed
by Jelle Saldien, Kristof Goris and Jeroen Vandenbrande.
Jelle Saldien is industrial engineer with an
additional degree in product development. His master’s thesis was a pre-study
on Probo. The focus of his research is the design and the construction of the
robot Probo and the control software with the implementation of emotions and
facial expressions. Jelle will graduate at the end of the year on this subject.
Kristof Goris is electro-mechanical engineer
and the focus of his PhD is the design and the construction of the hardware of
robot Probo and the implementation of inherent safe and compliant actuation.
Kristof will graduate at the end of the year on this subject.
Jeroen Vandenbrande is industrial engineer and
technician of the project.
Probo is developed with the support of Brussels
ministers Guy Vanhengel (responsible for informatics) and Benoît Cerexhe
(responsible for scientific research) through the ISRIB (Institute for the
encouragement of Scientific Research and Innovation of Brussels) and CIBG
(Brussels Regional Informatics Centre).
When the general public is
able to see Probo for the first time?
Probo will be shown for the first time to the
general public during the robot contest RoboCup Junior in the science museum
Technopolis on May 16th. Also the ProboGotchi-game can be played during that
day. More info : www.robocupjunior.be
Contact information
Jelle
Saldien (researcher): 0485-27 19 81
Prof. dr. ir. Dirk Lefeber (promotor): 0497-91 42 09
Press office Vrije Universiteit Brussel: Karolien Merchiers: 02-629 21 37 or 0473-96 41 37
Nadya De
Beule, spokesperson minister Vanhengel: 0497-59 99 73
Béatrice Van Schendel, spokesperson minister Cerexhe: 0499-58 88 51
High resolution pictures and videos can be downloaded from:
Please use credit:
“Probo – Vrije Universiteit Brussel”